ロボットKXR-L2にジャイロセンサーを搭載してみた
MASATOSHI FUKUDA
@mstsfkd
お久しぶりです。MASAです。
今回は以前作成したロボットにジャイロセンサーを搭載して、歩行の安定性向上を試みました。
◾️おさらい
対象のロボットは近藤科学様の「KXR-L2 ヒューマノイド型 Ver2」です。16個のサーボモータを搭載しており、安定した二足歩行の他、様々な動作が可能なロボットです。 またバックパックに制御基板があり、センサー等の増設や、Raspberry Pi等他CPUとの連動も可能となってます。
https://kondo-robot.com/product/03155

◾️ジャイロセンサー
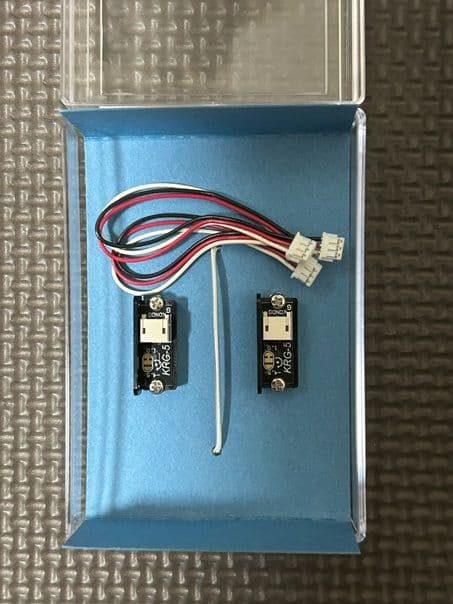
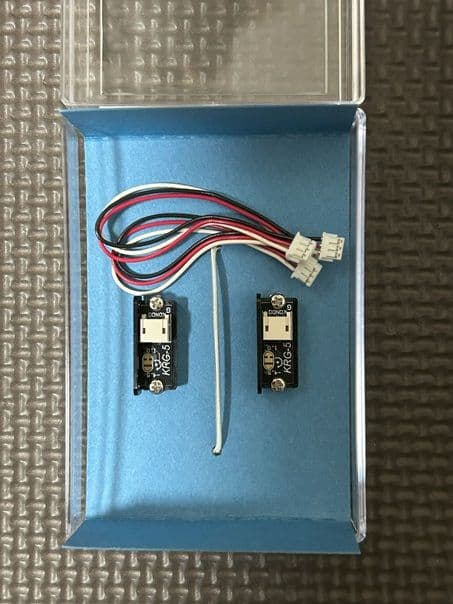
今回搭載するジャイロセンサーは近藤科学様の「KRG-5(Bセット)」です。 KRG-5は軽量で省スペース設計されており、今回のロボットのバックパック内に搭載できます。また検出方向に合わせて90°回転させて搭載が可能です。
https://kondo-robot.com/product/03214
◾️実際に搭載してみた
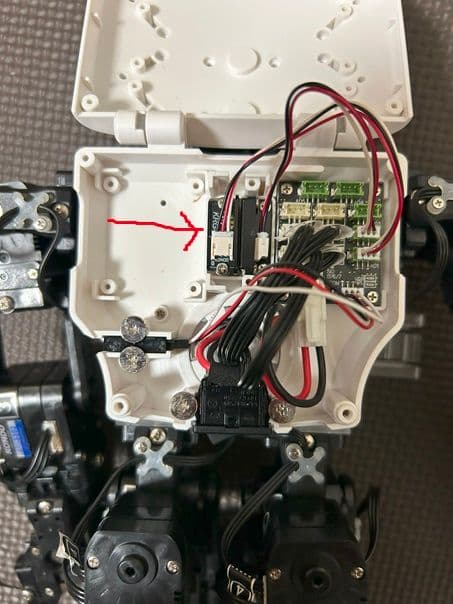
こちらのリンクを参考にロボットにジャイロセンサーを2個(搭載してみました。
https://kondo-robot.com/w/wp-content/uploads/KXR_OptionManual_KRG-5V1.pdf
搭載自体は簡単にできました。ただ搭載時に「ロボット組立時に余ったネジを用いよ」とあり、家の中からネジを発掘するのに苦戦しました 笑
■パラメータ設定して実際に歩かせてみた
センサーを取り付けたら、ロボットの設定ソフト「HeartToHeart」でパラメータを設定して、実際に歩かせてみました。場所はクッション性のあるマットの上です。
パラメータの設定方法及び補正原理も先程と同じく下記サイトを参考にしました。補正原理は簡単に言うと「ロボットの傾き量に応じて、それを打ち消すようにモーターの角度を設定する」です。
https://kondo-robot.com/w/wp-content/uploads/KXR_OptionManual_KRG-5V1.pdf
今回上記サイトにあるパラメータ値以外の値も試してどうなるか検証しました。
【ケース0】センサー取付前
床のクッションのせいで上手く歩くことができませんでした。
【ケース1】取説に従ったパラメータ値
センサーをつける前と比べて歩行が安定するようになりました。
【ケース2】取説パラメータ値×2 パラメータの値を大きくして、ロボットの傾きに対し逆向きにより大きな補正をかけるようにしましまが、結果ダメでした。補正をかけすぎると歩行時の姿勢が逆にくずれてしまうようです。
【ケース3】取説パラメータ値×0.5 ケース2と逆に補正を抑えるようにしましたが、今度は補正が足りずダメでした。
【ケース4】取説パラメータ値×5 あえて過剰なパラメータを設定してどのような挙動をとるか検証しました。パラメータの値を大きくしすぎると、床にロボットを置いた時のわずかな傾きにも反応してしまい、立つことすらできませんでした
【ケース5】取説パラメータ値×-1 最後にパラメータのプラスマイナスを逆に設定しました。すると傾きに対し更に増幅させる方に補正がかかるので、僅かな傾きが発生すると前後に揺れながらその傾きが大きくなりダメでした。
ロボットの歩行を安定させる為には、ただセンサーをつければ良いというだけでなく、正しいパラメータを設定しないといけないというのを体感できました。今後はより適切なパラメータ設定を模索していきたいと思います。